Communications¶
Various communication standards are supported by BLISS:
Serial line¶
https://en.wikipedia.org/wiki/Serial_port
Controller side¶
Example of code to declare a Serial line object within a controller:
from bliss.comm.util import get_comm, SERIAL
class Mechonics(Controller):
def __init__(self, *args, **kwargs):
Controller.__init__(self, *args, **kwargs)
# Communication
comm_option = {'baudrate': 19200}
self.serial = get_comm(self.config.config_dict, **comm_option)
Note
In this example, baudrate is hard-coded in controller module: it cannot be changed in YML file.
YML configuration¶
Example of YML configuration file to be used with previous controller:
-
controller:
class: Mechonics
name: mechoCN30
serial:
url: /dev/ttyS0
axes:
- name: m1
velocity: 1
acceleration: 1
steps_per_unit: 1
channel: 1
Note
url field is the serial device file name and the only mandatory parameter.
Optional parameters¶
-
baudrate- Usually in:
1200,2400,4800,9600,19200,38400,57600,115200 - Default:
9600
- Usually in:
-
bytesize- Usually in:
7(for true ASCII)8(for most kinds of data, as this size matches the size of a byte)
- Default:
8
- Usually in:
-
dsrdtr- Enable hardware (DSR/DTR) flow control
- Data Set Ready / Data Terminal Ready
- Default: False
-
eol- Specify the end-of-line string to use when READING data from a device
- Default: b
\n
-
interCharTimeout- inter byte timeout setting.
- Default:
None - NB:
inter_byte_timeoutin new PySerial version
-
parity- Usually in:
'N': none'O': odd,'E': even (not really used:'M': mark,'S': space) - Default:
None
- Usually in:
-
port- Default: identic to url
-
rtscts- Enable hardware (RTS/CTS) flow control.
- Request to Send / Clear to Send
- Default:
False
-
stopbits- Default:
1
- Default:
-
timeout- Default:
5.0
- Default:
-
writeTimeout- Default:
None
- Default:
-
xonxoff- Default:
False
- Default:
ser2net¶
Ser2net (aka rfc2217) is a protocol to deport serial line over ethernet.
Such a remote serial line can be used in rfc2217 mode or ser2net mode.
ser2net mode allows to define the remote serial device to use in local config (considering a well configured (with control port) ser2net server)
rfc2217 mode uses the mapping “port <-> serial device” defined on the remote host in ser2net config file
-
controller:
class: Mechonics
name: mechoCN30
serial:
url: ser2net://lidXXX:29000/dev/ttyRP11
axes:
- name: m1
velocity: 1
acceleration: 1
steps_per_unit: 1
channel: 1
or:
-
controller:
class: Mechonics
name: mechoCN30
serial:
url: rfc2217://lidXXX:28001
axes:
- name: m1
velocity: 1
acceleration: 1
steps_per_unit: 1
channel: 1
Not declared in config¶
Serial line detached from a controller¶
Mainly for tests and debugging purpose.
Declared in config¶
To get a ser0 object usable in a BLISS session using the comm
plugin.
plugin: comm
controller:
- name: ser0
serial:
url: /dev/ttyS0
eol: b"\r\n"
Not declared in config¶
Example to declare a serial line directly from a BLISS shell.
from bliss.comm.util import get_comm, SERIAL
conf = {"serial": {"url": "/dev/ttyS0"}}
opt = {"parity": "N", "eol":b"\r\n"}
kom = get_comm(conf, ctype=SERIAL, **opt)
print(kom.write_readline(b"*IDN?\n"))
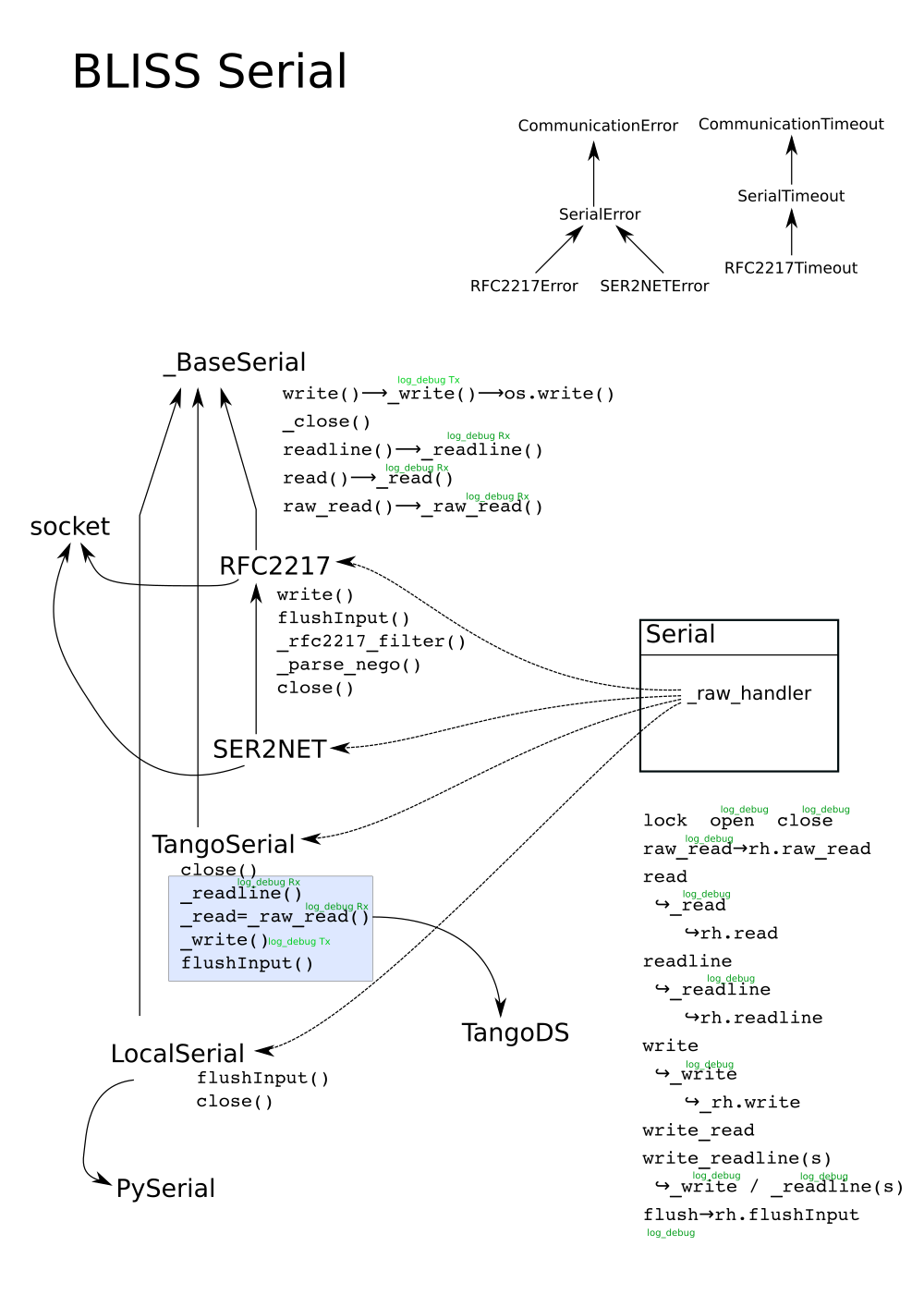
Serial BLISS devices structure¶
TCP socket¶
TCP socket detached from a controller¶
Mainly for tests and debugging purpose.
Declared in config¶
Not declared in config¶
Example to use in BLISS shell.
from bliss.comm.util import get_comm, TCP
conf = {"tcp": {"url": "trucmuch.esrf.fr"}}
opt = {"port":5025}
kom = get_comm(conf, ctype=TCP, **opt)
print(kom.write_readline(b"*IDN?\n"))
Controller side¶
Example to get a Socket object:
from bliss.comm.util import get_comm, TCP
class Aerotech(Controller):
def __init__(self, *args, **kwargs):
Controller.__init__(self, *args, **kwargs)
def initialize(self):
config = self.config.config_dict
opt = {'port':8000, 'eol':b'\n'}
self._comm = get_comm(config, ctype=TCP, **opt)
other example:
class PressureTransmitter(object):
def __init__(self, name, config):
self.comm = get_comm(config, baudrate=9600)
YML configuration¶
Example of YML configuration file to be used with previous controller:
- class: aerotech
name: Аэрофлот
tcp:
url: 160.103.99.42
axes:
- name: rot
aero_name: X
velocity: 10.1
acceleration: 25.0
steps_per_unit: 6789.444
Mandatory parameters¶
-
url: It can be an IP address or a fully qualified name.- examples:
160.103.14.92zorglub.esrf.fr
- examples:
-
port: It’s the target host’s port to use.- example:
5025
- example:
Optional parameters¶
port¶
Default:
timeout¶
Default: 5.0
eol¶
The eol parameter that can be defined in config or in get_comm()
function is used by socket to read lines. It is not sent by the
write*() functions and therefore a terminaison character must be
added in all messages sent to a device.
Default: b\n
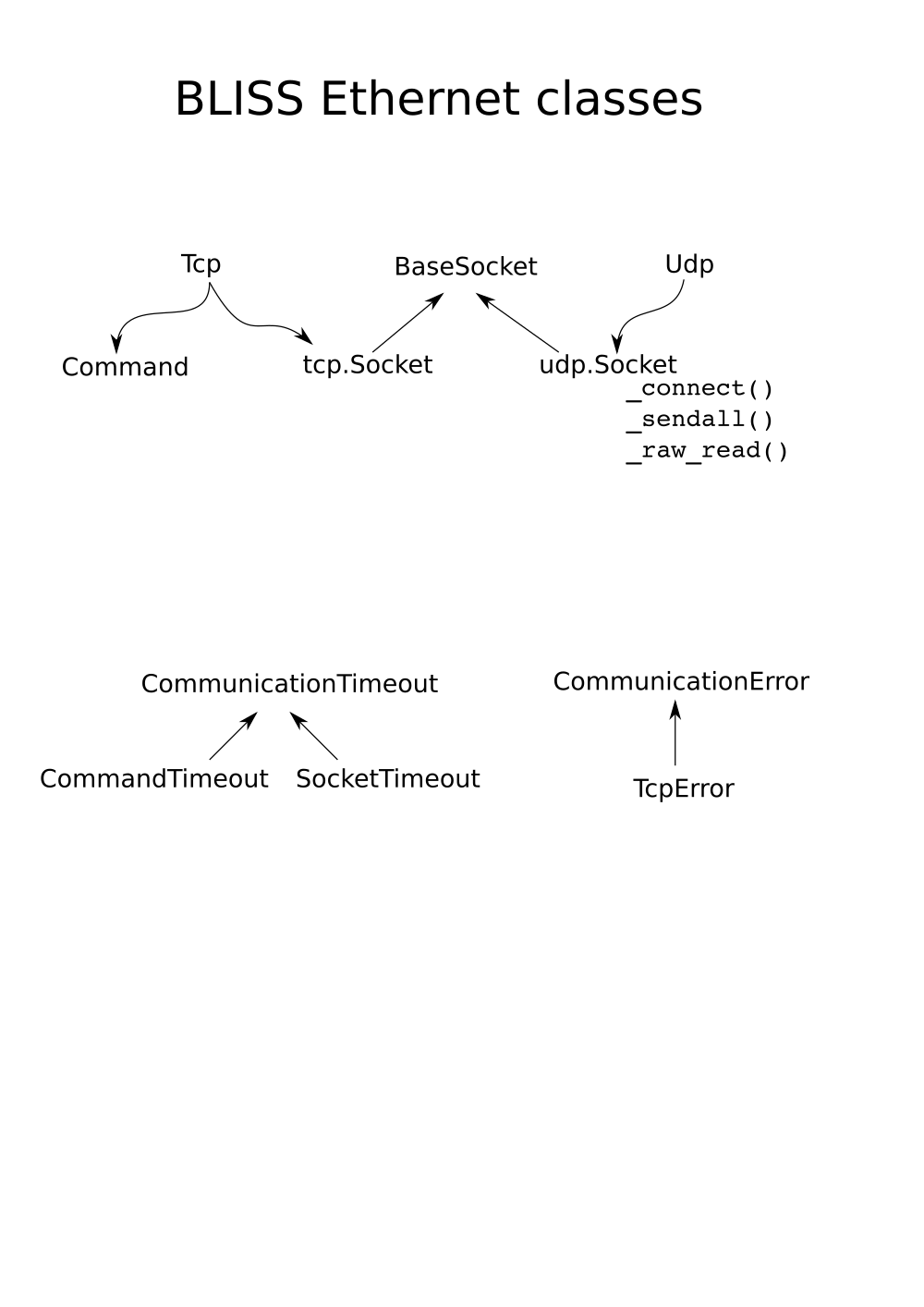
Ethernet BLISS devices structure¶
GPIB¶
There are various ways to communicate with Gpib devices:
- Gpib PCI board
- localy if BLISS is run on the same computer than the Gpib driver
- remotely if BLISS is run on another computer
- Gpib ethernet device: Enet box
Exmaple of gpib communication with PCI gpib board and tango device server:
gpib:
url: tango_gpib_device_server://id42/gpib_lid421/0
pad: 13
timeout: 10.
Exmaple of gpib communication with enet device:
gpib:
url: enet://gpibid42a.esrf.fr
pad: 15
timeout: 3.
GPIB communication detached from a controller¶
Mainly for tests and debugging purpose.
Declared in config¶
To get a gpib0 object usable in a BLISS session using the comm plugin.
plugin: comm
controller:
- name: gpib0
gpib:
url: enet://gpibid42a.esrf.fr
pad: 12
Not declared in config¶
Example to declare a GPIB communication directly from a BLISS shell.
from bliss.comm.util import get_comm, GPIB
conf = {"gpib": {"url": "enet://gpibid42a.esrf.fr"}}
opt = {"pad":12}
kom = get_comm(conf, ctype=GPIB, **opt)
print(kom.write_readline(b"*IDN?\n"))
UDP Socket¶
TODO
SCPI¶
TODO
modbus¶
TODO