Writing a custom scan¶
This section presents the fundamental concepts and objects involved in a scan procedure. It will describe how to write a custom scan through examples.
The acquisition chain¶
In Bliss, a scanning procedure is managed by the Scan object
(from bliss.scanning.scan).
The Scan object works on top of an AcquisitionChain object containing
AcquisitionObject objects (from bliss.scanning.chain).

The acquisition chain is a tree of acquisition objects organized in a masters and slaves hierarchy.

There are two kind of objects built on top of the AcquisitionObject base
class: AcquisitionMaster and AcquisitionSlave (from bliss.scanning.chain).
- The
AcquisitionMasteris able to trigger the acquisition slaves below itself. - The
AcquisitionSlaveis always at the end of a branch of the acquisition chain.
The role of the AcquisitionObject is to encapsulate a CounterController in order to
use it in the context of a scan.
The AcquisitionObject defines:
- how to behave while receiving incoming triggers (software and/or hardware)
- how to acquire data
- how to publish data
The underlying CounterController is the one who knows how to read the data
from the hardware device.
The acquisition chain can be conceptually split in two regions.

On the left, the static part containing the top level masters. This part must be entirely described by the author of the scan procedure.
On the right, the dynamic part which depends on the list of counters given to
this scan procedure. The construction of this part will be partially managed by
the ChainBuilder object. From the given list of counters, the ChainBuilder
object will find the CounterController on top of each counter.
All counter controllers are able to return the special AcquisitionObject
associated with themselves (see CounterController.get_acquisition_object()).
Also, if a counter controller has a master controller on top of it, the chain builder will find it and register the links (like LimaMaster on top of LimaRoi and LimaBPM in the figure above).
A simple scan example¶
Below, an example of a scan procedure which performs a step scan on one axis.
To make it simple, this scan will only handle Lima controllers and associated counters.
def scan_demo( motor, start, stop, npoints, count_time, *counters ):
#----- Initialize the chain object -------------------------------
chain = AcquisitionChain()
#----- write the 'left side' of the chain
# the MotorMaster
acq_master = LinearStepTriggerMaster(npoints, motor, start, stop)
#----- write the 'right side' of the chain
builder = ChainBuilder(counters)
#----- handle possible controllers introduced by the counters
#----- handles the Lima controllers
#----- and associated counters such as Images, Rois and BPMs -----
lima_params = {
"acq_nb_frames": npoints,
"acq_expo_time": count_time * 0.9,
"acq_trigger_mode": "INTERNAL_TRIGGER_MULTI",
"prepare_once": True,
"start_once": False,
}
for node in builder.get_nodes_by_controller_type(Lima):
# setting the parameters of the LimaMaster is enough
# the children slaves under the LimaMaster will try to find
# their parameters from the LimaMaster parameters
node.set_parameters(acq_params=lima_params)
# adding the LimaMaster to chain is enough
# the children slaves (ROI, BPM) are automatically placed below
# their master
chain.add(acq_master, node)
#----- print some information about the chain construction --------
#print the result of the introspection
builder.print_tree(not_ready_only=False)
#print the chain that has been built
print(chain._tree)
#----- finalize the scan construction ----------------------------
scan_info = {
"npoints": npoints,
"count_time": count_time,
"start": start,
"stop": stop,
"type": "continous_scan_demo",
}
sc = Scan(
chain,
name="scan_demo",
scan_info=scan_info,
#save=False,
#save_images=False,
#scan_saving=None,
#data_watch_callback=StepScanDataWatch(),
)
#----- start the scan ----------------------------
sc.run()
The static part of the scan definition (‘left side’)¶
In the first part, the chain object and the motor top master are instantiated.
The motor top master (LinearStepTriggerMaster) will perform npoints steps
from start position to stop position.
As a top master, it will be the first in the chain (root) and it will be the one who triggers all other acquisition objects that are placed under him.
The top master is not put in the chain yet. It will be done later on when adding other acquisition objects in the chain under this one.
def scan_demo( motor, start, stop, npoints, count_time, *counters ):
#----- Initialize the chain object -------------------------------
chain = AcquisitionChain()
#----- write the 'left side' of the chain
# the MotorMaster
acq_master = LinearStepTriggerMaster(npoints, motor, start, stop)
The dynamic part of the scan definition (‘right side’)¶
In the second part, the chain builder object is instantiated with the list of
counters given to that scan (ChainBuilder(counters)).
Notice that, at that time, counters may contains different objects of
different types such as Counter, CounterController, MeasurementGroup.
builder = ChainBuilder(counters)
During its initialization, the chain builder will:
- obtain a flatten list of
Countersby retrieving counters fromCounterControllersandMeasurementGroups. - remove duplicated counters and sort the counters by name.
- sort the counters by dependency level (for example
CalcCountersare stored at the end of the counter list because they depend on others real counters). - introspect the counter list in order to find the
CounterControllerson top of the different counters and create oneChainNodeobject perCounterController. - check if the
CounterControllershave amaster_controlleron top of them. If true aChainNodeobject is created for themaster_controllerand the node registers theCounterControllersthat are attached to itself (seenode.children). Notice that amaster_controlleris an instance of aCounterController.
After this, the builder has created a dictionary of ChainNodes (one per
CounterController) (see builder.nodes). The role of the ChainNode object
is to store the information required to instantiate the AcquisitionObject
associated to each CounterController.
Handle the counters of a given type of CounterController (example with Lima)¶
Once the builder is initialized, the acquisition parameters required for each
AcquisitionObject associated to each CounterController must be defined.
To do so, the builder is able to return all nodes that hold a CounterController of a given type.
In this example the nodes of Lima controllers are returned (builder.get_nodes_by_controller_type(Lima)).
Then the lima acquisition parameters are declared and stored into the node (node.set_parameters(acq_params=lima_params)).
#----- handle possible controllers introduced by the counters
#----- handle the Lima controllers
#----- and associated counters such as Images, Rois and BPMs -----
lima_params = {
"acq_nb_frames": npoints,
"acq_expo_time": count_time * 0.9,
"acq_trigger_mode": "INTERNAL_TRIGGER_MULTI",
"prepare_once": True,
"start_once": False,
}
for node in builder.get_nodes_by_controller_type(Lima):
# setting the parameters of the LimaMaster is enough
# the children slaves under the LimaMaster will try to find
# their parameters from the LimaMaster parameters
node.set_parameters(acq_params=lima_params)
The last thing to do with the Lima node is to define where to put it in
the acquisition chain. In this example it is placed under the
LinearStepTriggerMaster (chain.add(acq_master, node)). It means that it
will be the LinearStepTriggerMaster who triggers the LimaAcquisitionMaster
and then the LimaAcquisitionMaster will trigger the slaves under itself.
# adding the LimaMaster to chain is enough
# the children slaves (ROI, BPM) are automatically placed below
# their master
chain.add(acq_master, node)
The LimaAcquisitionMaster associated to that node is created only at that time
(when putting it into the chain). The LimaAcquisitionMaster is instantiated
using the acquisition parameters that have been stored into the node (see
node.acquisition_parameters). If this node has children nodes (example
LimaRoi and LimaBPM), the AcquisitionObject of each child node will be
instantiated at this time and placed in the chain below the AcquisitionObject of
this node (i.e. below the LimaAcquisitionMaster). If the acquisition parameters of the children nodes have not been
set, the children nodes will try to find their parameters in the parent
parameters.
Setting the children nodes parameters explicitly¶
In the case where it is necessary to set the children parameters explicitly, the children of a node can be managed like this:
lima_params = {
"acq_nb_frames": npoints,
"acq_expo_time": count_time * 0.9,
"acq_trigger_mode": "INTERNAL_TRIGGER_MULTI",
"prepare_once": True,
"start_once": False,
}
lima_children_params = {"count_time": count_time * 0.8, "npoints": npoints }
for node in builder.get_nodes_by_controller_type(Lima):
node.set_parameters(acq_params=lima_params)
for child_node in node.children:
child_node.set_parameters(acq_params=lima_children_params)
Now, the possible counters related to the Lima controller have been handled.
Handle other type of devices¶
To handle other type of controllers/counters, just repeat what has been done above but adapt the acquisition parameters and the type of controller.
xxx_params = {
"abc": ... ,
"foo": ... }
for node in builder.get_nodes_by_controller_type( xxx ):
node.set_parameters(acq_params=xxx_params)
Check what you have done¶
In order to check if all the ChainNodes of the builder have been managed
properly, use builder.print_tree() to show/print the tree
representation of the chain nodes. If the argument not_ready_only is True, it
will be printed only if some nodes have not been treated. In order to check if
the chain has been built properly and looks as expected, use
print(chain._tree) to show/print the tree representation of the acquisition
chain.
#----- print some information about the chain construction --------
# print the result of the introspection (ChainNodes of the builder)
builder.print_tree(not_ready_only=False)
# print the chain that has been built (AcquisitionChain as a tree)
print(chain._tree)
Finalize and run your scan¶
To finalize the writing of the scan procedure, create the Scan
object passing the chain and the scan_info. The scan_info is a dictionary
containing the information to be exposed to the outer world. Finally,
start the scan by calling its run() method.
#----- finalize the scan construction ----------------------------
scan_info = {
"npoints": npoints,
"count_time": count_time,
"start": start,
"stop": stop,
"type": "continous_scan_demo",
}
sc = Scan(
chain,
name="scan_demo",
scan_info=scan_info,
#save=False,
#save_images=False,
#scan_saving=None,
#data_watch_callback=StepScanDataWatch(),
)
#----- start the scan ----------------------------
sc.run()
An example with two top master¶
In most common cases, the need for two top master in a scan comes
from the fact that some counters could not follow the trigger speed of
the fast acquisition chain. But still those counters need to be
monitored. The monitored part is like a timescan aside the fast
acquisition chain.
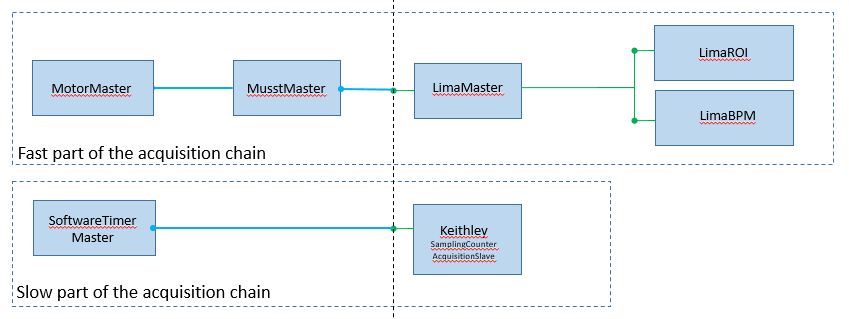
In the following example, all Lima controllers will be part of the fast acquisition chain. All sampling counters given as argument will be part of the monitoring (slow acquisition chain).
from bliss.scanning import chain
from bliss.scanning import scan
from bliss.scanning import toolbox
from bliss.scanning.acquisition.motor import MotorMaster
from bliss.scanning.acquisition.musst import MusstAcquisitionMaster
from bliss.scanning.acquisition.timer import SoftwareTimerMaster
from bliss import setup_globals
from bliss.controller import lima
def fast_and_monitor(motor,start,stop,npoints,count_time,*counters,
monitor_time=0.5):
builder = toolbox.ChainBuilder(counters)
#Fast part is composed of a MotorMaster and a Musst.
#creation of the main top master with the motor passed as argument
fast_top_master = MotorMaster(motor,start,stop,time=count_time*npoints)
#creation of musst master which will be trigger by the motor master
musst_master = MusstAcquisitionMaster(setup_globals.musst,
program="my_fast_scan_prog"
vars={"START_POS":int(start*motor.steps_per_unit),
"STOP_POS":int(stop*motor.steps_per_unit),
"NPOINTS":npoints})
#Add them to the acquisition chain
chain.add(fast_top_master,musst_master)
#In this simple example we manage only lima camera
#in the fast part of the acquisition.
for lima_node in builder.get_nodes_by_controller_type(lima.Lima):
lima_node.set_parameters(acq_params={"acq_nb_frames": npoints,
"acq_expo_time": count_time * 0.9,
"acq_trigger_mode": "EXTERNAL_TRIGGER_MULTI",
"prepare_once": True,
"start_once": True})
#Add lima device under the musst
chain.add(musst_master,lima_node)
#Creating the timescan part
#First create the monitor timer
monitor_timer = SoftwareTimerMaster(count_time=monitor_time)
#All left sampling counters will be added to the monitoring acquisition part
for sampling_node in builder.get_nodes_by_controller_type(SamplingCounterController):
sampling_node.set_parameters({'count_time':monitor_time,
'npoints':0})
#Add sampling under the monitor timer
chain.add(monitor_time,sampling_node)
s = Scan(chain,
name='fast_and_monitor',
scan_info={'npoints':npoints,
'count_time':count_time,
'start':start,
'stop':stop})
s.run()
return s