Communication protocols¶
BLISS implements the following communication protocols:
Helper function get_comm¶
To create the communication object, BLISS provides a unique helper function:
def get_comm(config, ctype=None, **opts)
This helper creates the communication object from the YAML configuration or a
simple dictionary (config). If a communication option is not found in
config, it will look in the default options dictionary opts. If the option
cannot be found in either config or opts, the communication class will use
its own default. The type of communication deduced from the configuration can
by checked by providing the ctype argument.
Example of standalone serial line communication
from bliss.comm.util import get_comm, SERIAL
conf = { 'serial': {'url': '/dev/ttyS0'}, }
default_options = {'baudrate': 19200, 'eol': b'\r'}
comm = get_comm(conf, ctype=SERIAL, **default_options)
From YAML configuration file¶
YAML example
name: ser0
plugin: comm
serial:
url: /dev/ttyS0
eol: "\r\n" # Note: use double quotes (and not single ones)
from bliss.config.static import get_config
ser0 = get_config().get('ser0')
Note
Notice that it requires the comm plugin.
Within a controller¶
YAML example
class: FooController
name: foo
serial:
url: /dev/ttyS0
from bliss.comm.util import get_comm, SERIAL
class FooController:
def __init__(self, config):
self.config = config
self._comm = None
def _init_com(self):
default_options = {'baudrate': 19200}
self._comm = get_comm(self.config, ctype=SERIAL, **default_options)
Serial line¶
https://en.wikipedia.org/wiki/Serial_port
YML configuration¶
serial:
url: /dev/ttyS0
Mandatory parameters¶
url: serial device file name
Optional parameters¶
-
baudrate:- Values: [
1200,2400,4800,9600,19200,38400,57600,115200] - Default:
9600
- Values: [
-
bytesize:- Values: [
7(true ASCII) ,8(most cases)] - Default:
8
- Values: [
-
dsrdtr: enable hardware flow control (DSR/DTR)- Values: [
False,True] - Default:
False
- Values: [
-
eol: end-of-line string to READ data- Default:
"\n" - Note: use double quotes (and not single ones)
- Default:
-
interCharTimeout: inter byte timeout setting- Default:
None - NB:
inter_byte_timeoutin new PySerial version
- Default:
-
parity:- Values: [
'N': none,'O': odd,'E': even,'M': mark,'S': space] - Default:
'N'
- Values: [
-
port:- Default: same as
url
- Default: same as
-
rtscts: enable hardware flow control (RTS/CTS)- Values: [
False,True] - Default:
False
- Values: [
-
stopbits:- Default:
1
- Default:
-
timeout:- Default:
5.0
- Default:
-
writeTimeout:- Default:
None
- Default:
-
xonxoff:- Values: [
False,True] - Default:
False
- Values: [
Tango Serial Line¶
BLISS serial communication object can talk to a Tango Serial device server.
- name: nvolpi5
plugin: bliss
class: Intraled
serial:
url: tango://id42/serial_133_232/08
eol: "\r\n" # Note: use double quotes (and not single ones)
baudrate: 9600
parity: "N"
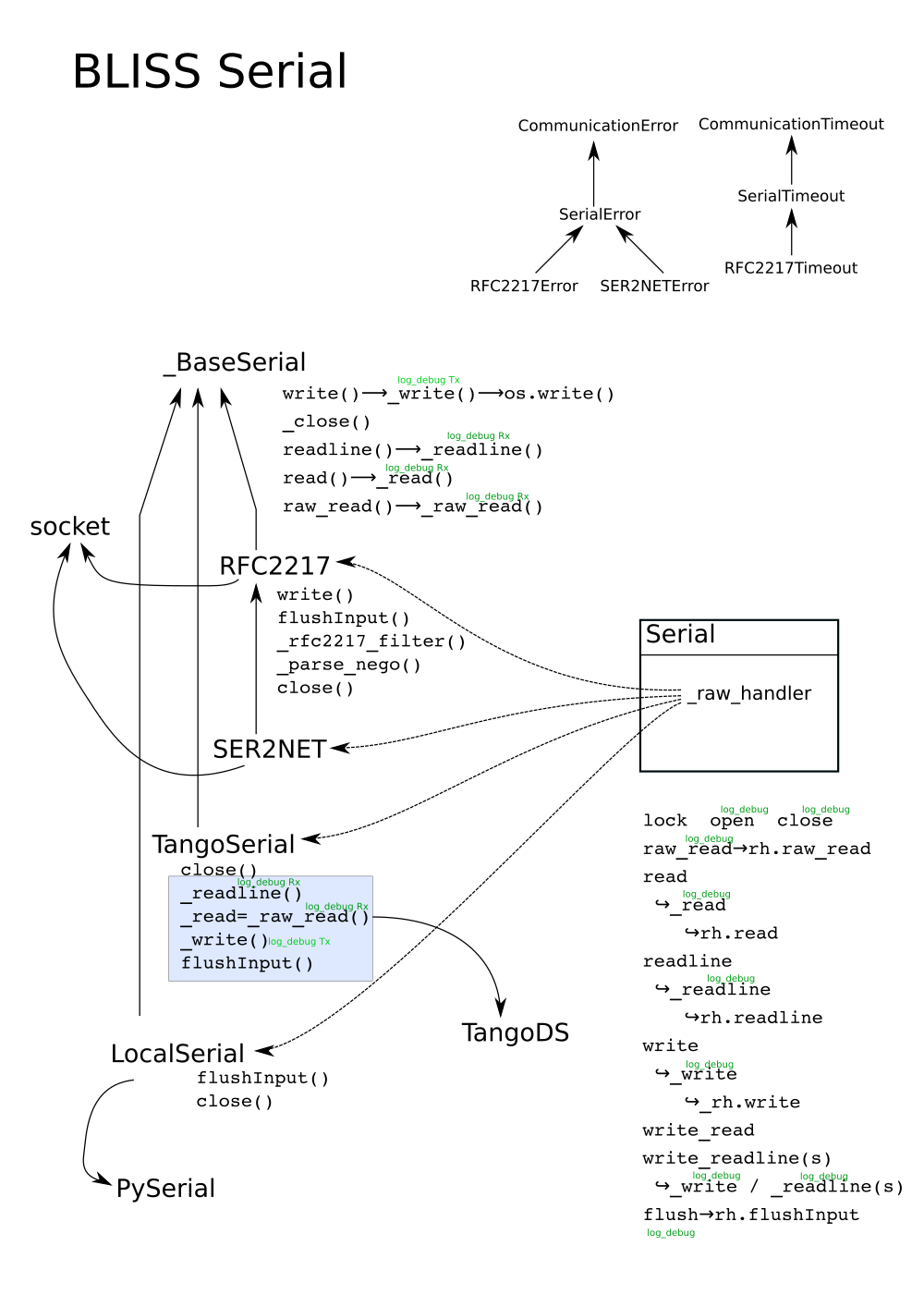
Serial BLISS devices structure¶
Ser2net¶
Ser2net (aka rfc2217) is a protocol to deport serial line over ethernet.
Such a remote serial line can be used in rfc2217 mode or ser2net
mode.
ser2net mode allows to define the remote serial device to use in local
config (considering a well configured ser2net server with control port)
rfc2217 mode uses the mapping “port <-> serial device” defined on the
remote host in ser2net config file
YML configuration¶
serial:
url: ser2net://lidXXX:29000/dev/ttyRP11
or:
serial:
url: rfc2217://lidXXX:28001
Mandatory parameters¶
Optional parameters¶
TCP socket¶
YML configuration¶
tcp:
url: 160.103.99.42
eol: "\r\n" # Note: use double quotes (and not single ones)
Mandatory parameters¶
url: IP address or a fully qualified name- examples:
160.103.14.92:5432zorglub.esrf.fr
- examples:
Optional parameters¶
-
port: target host’s port- example:
5025
- example:
-
timeout:- Default: 5.0
-
eol: end-of-line string to READ data- Default:
"\n" - Note: use double quotes (and not single ones)
- Default:
TCP proxy¶
tcp-proxy is a server allowing to share a socket connection between more than
one Bliss controller. It runs in a processus distinc from bliss session.
It can be used to control a device that allows only one tcp connection.
This is typically the case of PI piezo or Keithley controllers.
Warning
This class does not perform serialization of the communication.
Note
tcp-proxy, not tcp_proxy ;-)
Configuration example for a Keithley:
- plugin: keithley
keithleys:
- name: k_pico1
model: 6485
tcp-proxy:
external: False
tcp:
url: id14serial1.esrf.fr:9001
timeout: 3
eol: "\n" # Note: use double quotes (and not single ones)
sensors:
- name: pico1
address: 1
nplc: 0.1
auto_range: True
zero_check: False
zero_correct: False
unit: pA
By default, at client initialization, Bliss will spawn a process tcp-proxy
which will be shared by all bliss sessions using that tcp-proxy
object.
Another alternative is to use external: True option and to start this process
externally, via multivisor for example.
There are two option to externally start the tcp-proxy server:
-
by giving host / port :
tcp-proxy --host id14serial1.esrf.fr --port 9001 -
by giving beacon object name holding the tcp configuration :
tcp-proxy --beacon-name k_pico1
Usage of external server allows:
- to restart it without restarting the Bliss session
- to put the server on another computer to use a private connection to the controller. (this can be usefull for delicate controllers like PI piezo controllers)
- to debug communications with
--debugor-dflag
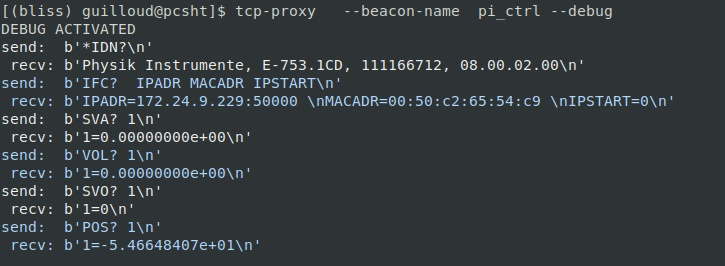
Colors are available if rich python module is installed.
Example of standalone TCP communication
from bliss.comm.util import get_comm, TCP
conf = { "tcp": {"url": "192.168.0.1:3615"}, }
default_options = {"eol": b"\r"}
comm = get_comm(conf, ctype=TCP, **default_options)
Note
kill_proxy_server() function is provided in case of problem to force
proxy to stop and restart.
UDP socket¶
TODO
GPIB¶
There are various ways to communicate with GPIB devices:
- GPIB PCI board
- locally if BLISS runs on the same computer than the GPIB driver
- remotely if BLISS runs on another computer
- GPIB ethernet device: Enet box
Example of GPIB communication with PCI GPIB board and tango device server:
gpib:
url: tango_gpib_device_server://id42/gpib_lid421/0
pad: 13
timeout: 10.
Example of GPIB communication with Enet device:
gpib:
url: enet://gpibid42a.esrf.fr
pad: 15
timeout: 3.
Example of standalone GPIB communication
from bliss.comm.util import get_comm, GPIB
conf = {"gpib": {"url": "enet://gpibid42a.esrf.fr"}}
opt = {"pad":12}
kom = get_comm(conf, ctype=GPIB, **opt)
print(kom.write_readline(b"*IDN?\n"))
SCPI¶
TODO
Modbus¶
TODO
VXI11¶
TODO