BLISS shell standard functions¶
Standard shell functions are automatically accessible in shell of any BLISS session.
motors¶
move¶
move([<motor>, <position>]+)ormv([<motor>, <position>]+): moves one or many motors to given position(s).
DEMO [10]: mv(simot1, 2)
DEMO [11]: mv(simot1, 3, spec_m3, 5)
NB: move() can take wait=False argument to be non-bloquant.
mvd (dial move)¶
mvd([<motor>, <position>]+): moves motor(s) to given dial position(s).
DEMO [12]: mvd(simot1, 2, spec_m3, 4)
umv (updated move)¶
umv([<motor>, <position>]+): same thanmove([<motor>, <position>]+)but shows continuously updated positions of motors.
DEMO [13]: umv(simot1, 1, spec_m3, 4)
simot1 spec_m3
user 0.390 3.258
dial 1.390 2.258
umvd (updated dial move)¶
umvd([<motor>, <position>]+): same thanmvd([<motor>, <position>]+)but shows continuously updated positions of motors.
mvr (relative move)¶
mvr([<motor>, <position>]+): move motor(s) relatively to current positions.mvdr([<motor>, <position>]+): move motor(s) relatively to current dial positions.
DEMO [5]: wa()
Current Positions (user, dial)
simot1 spec_m3
-------- ---------
3.00000 7.00000
3.00000 7.00000
DEMO [6]: mvr(simot1, 1, spec_m3, 2)
DEMO [7]: wa()
Current Positions (user, dial)
simot1 spec_m3
-------- ---------
4.00000 9.00000
4.00000 9.00000
umvr (updated relative move)¶
umvr([<motor>, <position_increment>]+): Same thanmvr()but shows continuously updated positions of motors.
CC4 [4]: umvr(m1, 1)
simot1
user 5.000
dial 4.000
umvdr (updated dial relative move)¶
umdvr([<motor>, <position_increment>]+): Same thanmvdr()but shows continuously updated positions of motors.
wa (where all)¶
wa(): Shows user and dial positions of configured motors.
DEMO [2]: wa()
Current Positions (user, dial)
pzth simot1 spec_m3
------ -------- ---------
!ERR 1.10000 1.46150
!ERR 1.10000 1.46150
wu (where user)¶
wu(): Shows user positions of configured motors.
DEMO [2]: wu()
Current Positions user
pzth simot1 spec_m3
------ -------- ---------
!ERR 1.10000 1.46150
wm (where motor)¶
wm([<mot_name>]+): Show user, dial and offset values of positions and limits for given motor(s).
DEMO [2]: wm(m1, m2)
m1[mm] m2
------- ---------- ----------
User
High 128.00000 -123.00000
Current 7.00000 -12.00000
Low -451.00000 456.00000
Offset 5.00000 0.00000
Dial
High 123.00000 123.00000
Current 2.00000 12.00000
Low -456.00000 -456.00000
lsmot¶
lsmot(): Print Motors configured in current session.
DEMO [2]: lsmot()
Motors configured in current session:
-------------------------------------
att1z bad bsy bsz calc_mot1 calc_mot2
custom_axis hooked_error_m0 hooked_m0 hooked_m1 jogger m0
m1 omega roby robz robz2 s1b
s1d s1f s1hg s1ho s1u s1vg
s1vo
sync¶
sync([<motor>]*): Force axes synchronization with the hardware. If no axis is given, it syncs all all axes present in the session
DEMO [38]: sync(simot1)
sta (all motors status)¶
sta(): Show status of all configured motors.
DEMO [13]: sta()
Axis Status
------- ----------------------
pzth <status not available>
simot1 READY (Axis is READY)
spec_m3 READY (Axis is READY)
stm (motors status)¶
stm(<mot>): Show status of motors given as parameters.
DEMO [3]: stm(mm1, mm2)
Axis Status
------ ---------------------
mm1 READY (Axis is READY)
mm2 READY (Axis is READY)
rockit (rock a motor around current position)¶
rockit(mot, total_move):Rock the motor mot around it’s current position ± total_move/2.
i.e: Rock the motor mm1 during a ascan. At the end of the context, the rocking will stop and the motor mm1 will be moved back the previous position.
with rockit(mm1, 10):
ascan(mm2,0,2,10,0.1,diode)
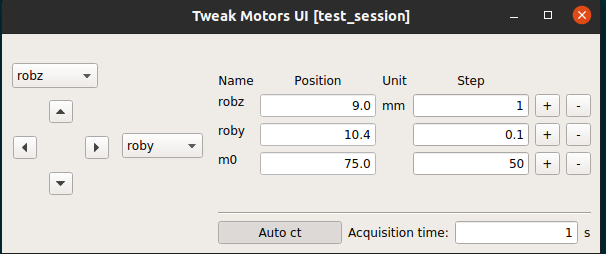
tw_gui (Tweak GUI)¶
tw_gui(<mot>): View motors in a Qt graphical user interface and move them.tw_gui(robz, roby, m0)
motor.tw() (Tweak CLI)¶
<mot>.tw(): Call a command-line variant of tweak tool to adjuste position of a motor.DEMO [2]: mm2.tw() NAME POSITION START POS STEP_SIZE ----------------------------------------------- ▶ mm2 265.4119 mm (265.41185) [step size=1] [COUNT] [count time=1 s] [ctrl-c] Abort [Q]uit [H]elp
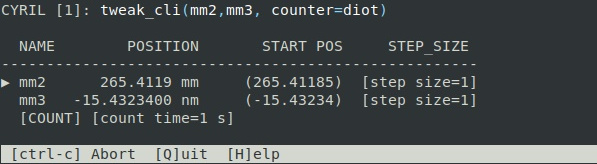
tweak_cli() function can also be called with more than one motor.
parameters:
counter: counter to count on after move.
DEMO [3]: tweak_cli(mm2,mm3, counter=diot)
NAME POSITION START POS STEP_SIZE
-----------------------------------------------------
▶ mm2 265.4119 mm (265.41185) [step size=1]
mm3 -15.4323400 nm (-15.43234) [step size=1]
[COUNT] [count time=1 s]
[ctrl-c] Abort [Q]uit [H]elp
Control keys:
+ - : increase/decrease step size of selected motor by 10%
* / : multiply / divide step size of selected motor by 2
= : restore default step size of selected motor
← → : move selected motor
↑ ↓ : change selected motor (indicated by the marck: ▶)
PgUp⇞ PgDn⇟ : multiply / divide count time by 2
b : go Back to start position (for all motors)
c : Count After Move on/off
v : Verbose mode on/off
esc 🅀 🅇 : Quit
? 🄷 ↩ : Help
counters¶
lscnt (list counters)¶
lscnt():
DEMO [1]: lscnt()
Name Shape Controller
----------------------- ------- ------------
simct1 0D None
simct2 0D None
simct3 0D None
simct4 0D None
simul_mca.AuLa 0D simul_mca
simul_mca.AuLa_det0 0D simul_mca
simul_mca.AuLa_det1 0D simul_mca
simul_mca.AuLa_det2 0D simul_mca
simul_mca.AuLa_det3 0D simul_mca
simul_mca.deadtime_det0 0D simul_mca
simul_mca.deadtime_det1 0D simul_mca
Bliss Objects¶
lsobj¶
-
lsobj(): print the list of BLISS objects defined in a session. Can be used with usual jocker characters:*: matches everything?: matches any single character[seq]: matches any character in seq[!seq]: matches any character not in seq
Examples:
TEST_SESSION [2]: lsobj("dio*") # all objects starting by 'dio'
diode diode2 diode3 diode4 diode5 diode6 diode7 diode8 diode9
TEST_SESSION [3]: lsobj("[abc]*") # all objects starting by 'a', 'b' or 'c'
beamstop att1 bad calc_mot1 calc_mot2 custom_axis
TEST_SESSION [6]: lsobj("???") # all objects with 3-lettres names
MG1 MG2 bad s1b s1d s1f s1u
lsconfig¶
lsconfig(): print the list of BLISS objects in config, not only objects declared in current session.
Example:
DEMO [2]: lsconfig()
MeasurementGroup:
----------------
demo_counters MG_tomo MG_sim MG_gauss MG_align
MultiplePositions:
-----------------
beamstop att1
Motor:
-----
wl_mono u42c u42b spec_m3 pzth_enc pzth psho pshg
psf psb motor7 motor6 mono mme mm_enc mm9
mm8 mm7 mm6 mm5 mm4 mm3 mm2 mm16
mm15 mm14 mm13 mm12 mm11 mm10 mm1 mech1
mc2 mc1_enc mc1 mbv4mot m5 m4 m3 m2
m1 kbvo kbvg kbho kbhg ice2 ice1 gal
fsh e_mono dummy2 dummy1 calc_mot blade_up blade_front blade_down
blade_back bend_u bend_d
None:
----
ser0 out1 kb1 hpz_rx hpz_off_2
hpz_off_1 hppstc2 hppstc1 controller_setting3 controller_setting2
controller_setting1
SimulationCounter:
-----------------
sim_ct_calib_gauss3 sim_ct_calib_gauss2 sim_ct_calib_gauss sim_ct_5 sim_ct_4
sim_ct_3 sim_ct_2 sim_ct_1 ct1
Session:
-------
test_session demo cyril
Data Policy¶
newproposal()newsample()newdataset(): Change the proposal sample and dataset names used to determine the saving path.
For more info about these three functions, see data policy section
Display¶
-
plotselect(): select counter(s) to plot in Flint -
clear(): clear the screen. -
silx_view(): launch Silx View on last scan’s data file. -
pymca(): launch PyMca on last scan’s data file.
Printer¶
-
pon(): Activate output redirection to the default printer. -
poff(): Deactivate output redirection to the printer and send redirected data to the printer.
Example to print position of all motors:
pon()
wa()
poff()
Dialogs¶
Some bliss objects can be used with dialogs.
The menu function can be used to check if an object has dialogs implemented.
Using menu() without further arguments will display all objects that have
dialogs implemented.
Using using menu(object) will launch the dialog with his effects.
If more than one dialog exists for the same object:
- the dialog name can be passed as a string like
menu(lima_simulator, "saving") - available dialogs can be selected using
menu(lima_simulator)
Usage example:
TEST_SESSION [2]: menu()
Out [2]: Dialog available for the following objects:
ACTIVE_MG
MG1
MG2
ascan
lima_simulator
test_mg
transfocator_simulator
wago_simulator
...
TEST_SESSION [3]: show(trasfocator_simulator)
.. HERE THE DIALOG DISPLAYS ..
Out [3]: Transfocator transfocator_simulator: # effects of dialog
P0 L1 L2 L3 L4 L5 L6 L7 L8
IN IN OUT IN OUT OUT IN IN IN
TEST_SESSION [4]: show(lima_simulator, "saving")
.. HERE THE DIALOG DISPLAYS ..
Out [4]: # display of return status if present
TEST_SESSION [5]: show(lima_simulator)
.. HERE SUBMENU DIALOG DISPLAYS ..
.. THAN SELECTED DIALOG DISPLAYS ..
Out [5]: # display of return status if present
Wago Interlocks¶
-
interlock_show([wago]*): display interlocks info for given Wagos (for all wagos if no parameter is given). -
interlock_state(): return a tuple containing the actual state of the interlocks.
introspection, doc, logging¶
Logging and Debug¶
-
lslog(): display the list of loggers. -
lsdebug(): display the list of loggers currently in debug mode. -
debugon()/debugoff(): activate/deactivate debug on a BLISS object.
elog_print¶
elog_print() can be used like python’s standard print() to send messages to the logbook.
elog_add¶
The output from a previously executed command can be sent to the logbook using
elog_add(<num>).
When the parameter <num> is positive it refers to the shell paragraph number.
When the parameter <num> is negative it refers to the shell paragraph relative
to the current paragraph number.
If no parameter is specify the previous paragraph is sent (corresponds to -1).
Following an example sending to the logbook for three times the same output:
DEMO [1]: transfocator_simulator
Out [1]: Transfocator transfocator_simulator:
P0 L1 L2 L3 L4 L5 L6 L7 L8
OUT IN IN IN OUT IN OUT IN OUT
DEMO [2]: elog_add() # adds previous paragraph (-1)
DEMO [3]: elog_add(1) # can be used with reference to the paragraph number
DEMO [4]: elog_add(-3) # can be also used with relative negative reference
elog_plot¶
Export the current curve plot to the logbook.
An optional argument allows to export the dedicated plot displaying a Lima or a MCA controller.
# Export to the logbook:
DEMO [2]: elog_plot() # - the default curve plot
DEMO [3]: elog_plot(lima_simulator) # - the plot displaying lima_simulator
prdef (print definition)¶
prdef(<function>): Display information about given function :
definition file, docstring and source code.
CC4 [17]: prdef(umv)
'umv' is defined in:
/users/blissadm/..../site-packages/bliss/common/standard.py:217
def umv(*args):
"""
Moves given axes to given absolute positions providing updated display of
the motor(s) position(s) while it(they) is(are) moving.
Arguments are interleaved axis and respective absolute target position.
"""
__umove(*args)
bench¶
bench() is a context manager to help benchmarking functions.
Example:
DEMO [14]: with bench():
...: time.sleep(1.987654)
Execution time: 1s 987ms 970μs
feedback_info()¶
feedback_info() function is intended to print contextual information about running session:
- date, plateform and host
- Bliss session name, release and version of the git repository
- Conda environment
Example:
DEMO [1]: feedback_info()
DATE: 2024-09-24 11:55:32.521733
PLATERFORM: Linux-4.19.0-14-amd64-x86_64-with-glibc2.28
VERSION: #1 SMP Debian 4.19.171-2 (2021-01-30)
HOST: lid421
CONDA_DEFAULT_ENV: bliss
BLISS release: 2.2.dev0
SESSION: demo
HASH: 914be42971c7421f7098322f3a8c9012ee4d5f68
REPO: /users/blissadm/PROJECTS/bliss/bliss
feedback_info_str() returns the corresponding string.
Note
feedback_info() can also be used outside of a session.
example:
(bliss21x) blissadm@piana:~$ python -c "from bliss.shell.standard import feedback_info_str;\
print(feedback_info_str())"
[...]
DATE: 2024-09-25 16:26:49.264110
PLATERFORM: Linux-5.15.0-117-generic-x86_64-with-glibc2.31
PLATERFORM VERSION: #127~20.04.1-Ubuntu SMP Thu Jul 11 15:36:12 UTC 2024
HOST: piana
CONDA_DEFAULT_ENV: blissmaster
BLISS release: 2.2.dev0
SESSION: None
REPO: /home/blissadm/local/bliss21x.git/bliss